PATENT
Brain-Computer Interface-based Sound Source Localization for Attending tasks in an Industrial environment via Human-Robot Interaction (Application Number: 202341087196)
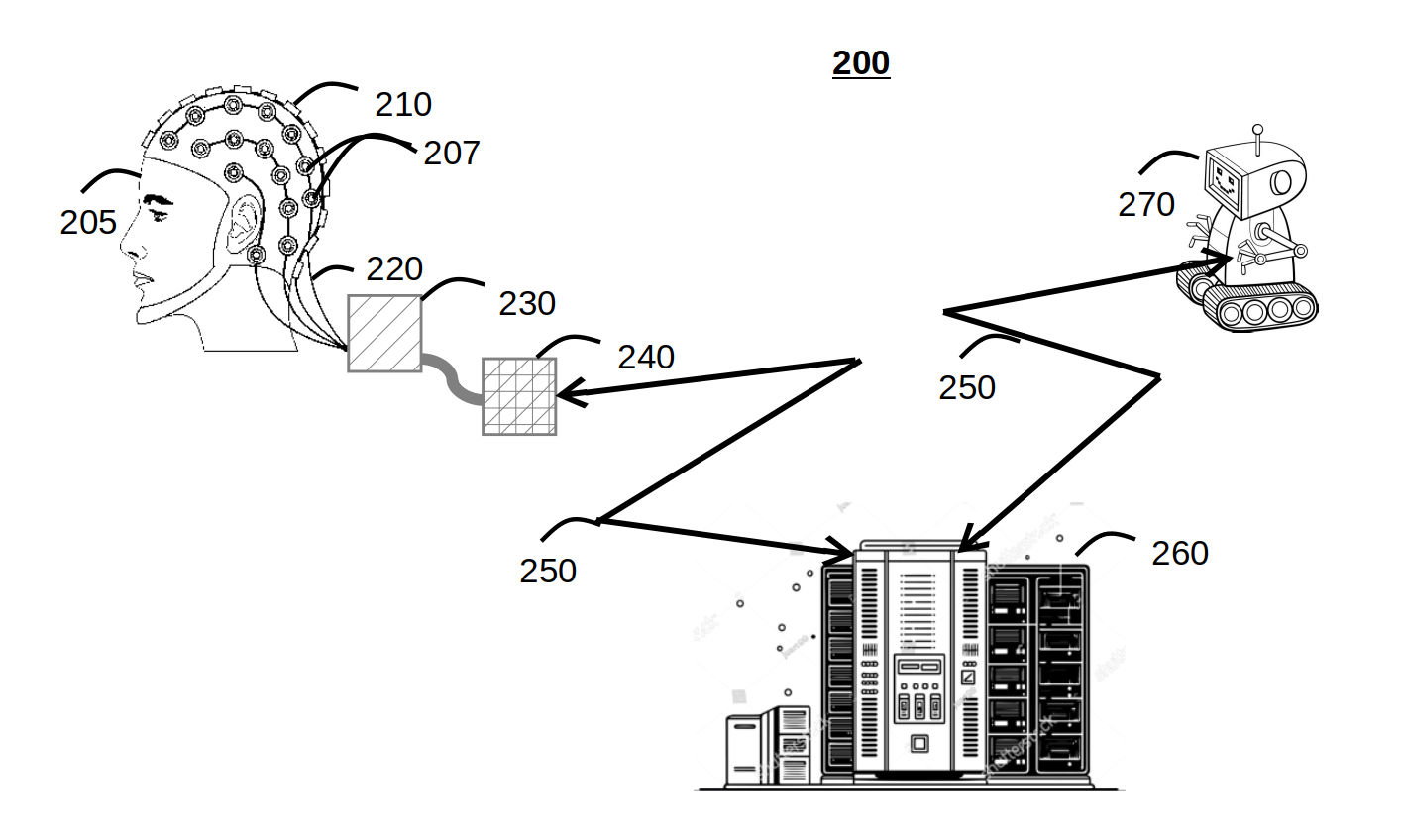
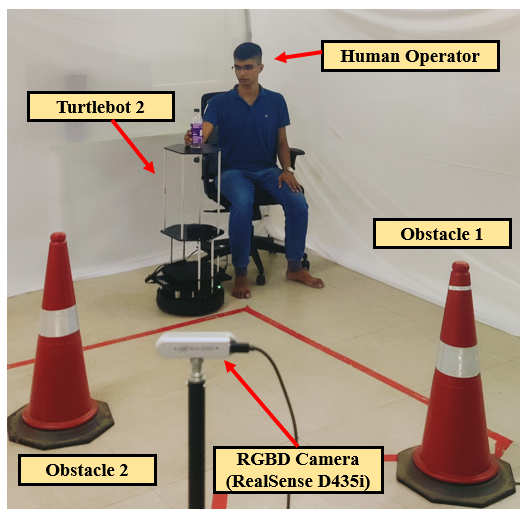
Embodiments of the disclosure relate to a Brain-Robot Interface framework using Auditory Steady State Response (ASSR) for audio-aware navigation of mobile robot in industrial environments.
PUBLICATIONS
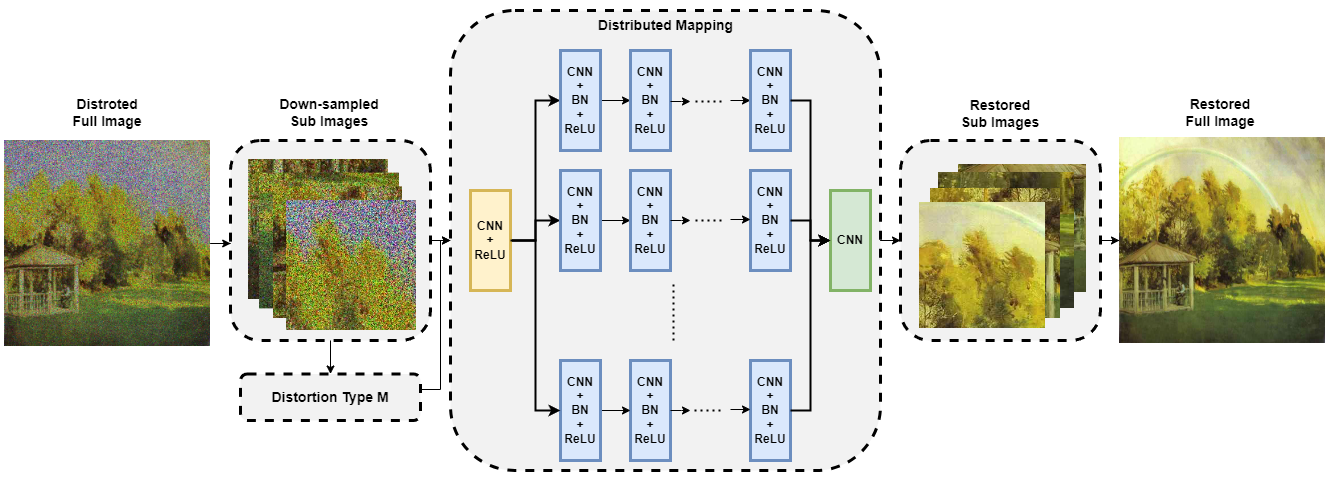
Transforming Pixels into a Masterpiece: AI-Powered Art Restoration using a Novel Distributed Denoising CNN (DDCNN) (Paper Presented at - IEEE International Conference on Emerging Techniques in Computational Intelligence (ICETCI) 2023 )
The work presents a creation of diverse dataset of deteriorated art images with various degradation levels and a CNN-based approach to restore intricate details in the art.
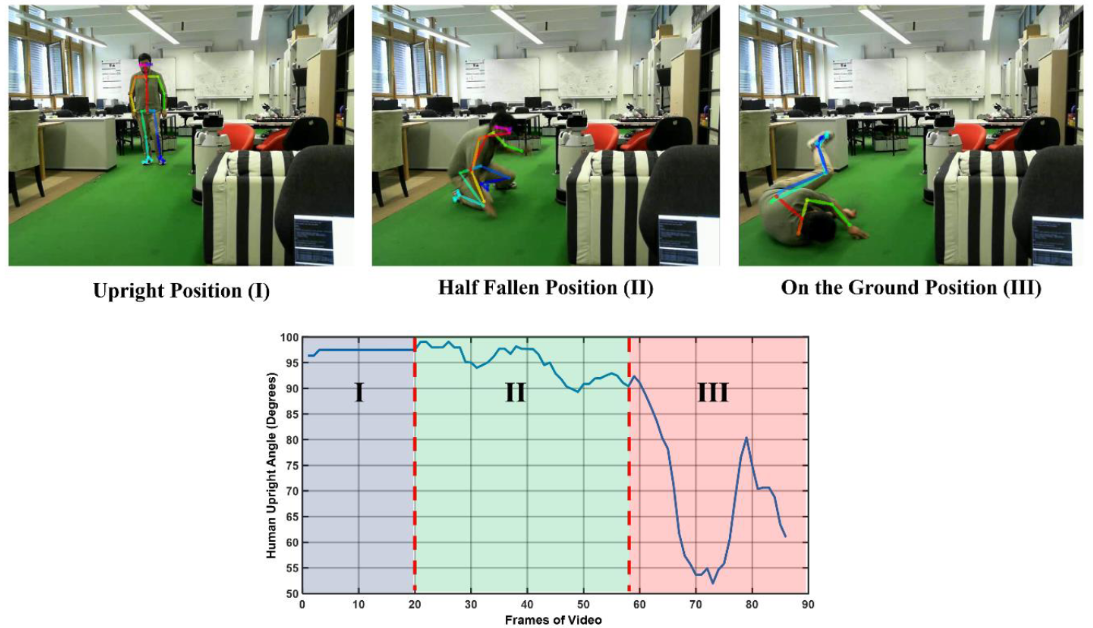
Advancing Assistive Robotics: Enhancing Robot Navigation through Activity Recognition (Poster accepted at - IEEE International Conference on Intelligent Robots and Systems (IROS) 2023 )
The work aims at the development of a reliable human activity recognition system driven through spatio-temporal feature extraction of human pose using human pose estimator model.
Unlocking the Secrets of Gesture-based Communication: A Feature Extraction Technique for Accurate Recognition of Human Activities in Socially Assistive Scenarios (Presented at - ACM Advances In Robotics (AIR) 2023)
The work aims at the development of a reliable human activity recognition system driven through spatio-temporal feature extraction of human pose using human pose estimator model.
PROJECTS
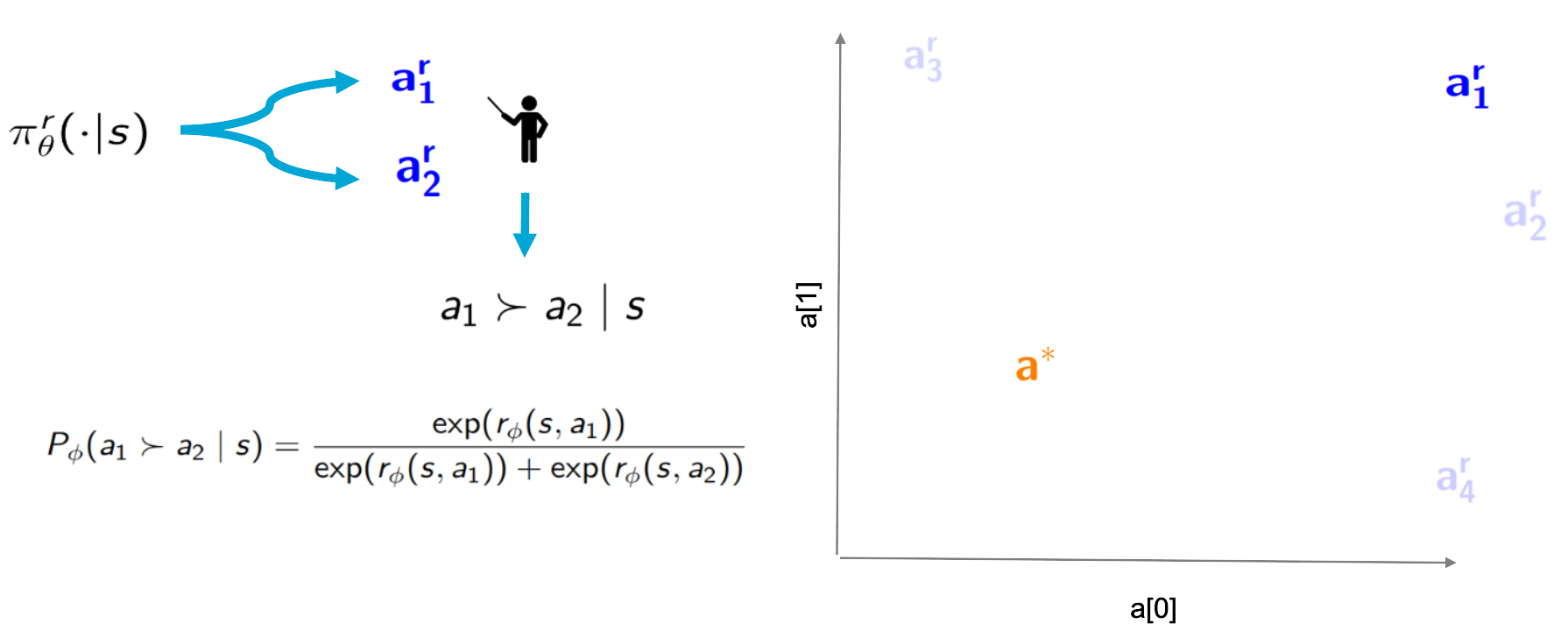
[Ongoing]: Structured Preference Learning with Corrective Actions for Sample-Efficient Reward Learning
Preference-based reward learning methods rely on relative comparisons, resulting in high sample complexity when feedback is noisy or sub-optimal. This research investigates on developing astructured preference learning framework incorporating corrective actions and geometric constraints to improve sample efficiency androbustness to sub-optimal feedback.
Project under the guidance of Zhaoting Li, Prof Jens Kober for MSc Thesis
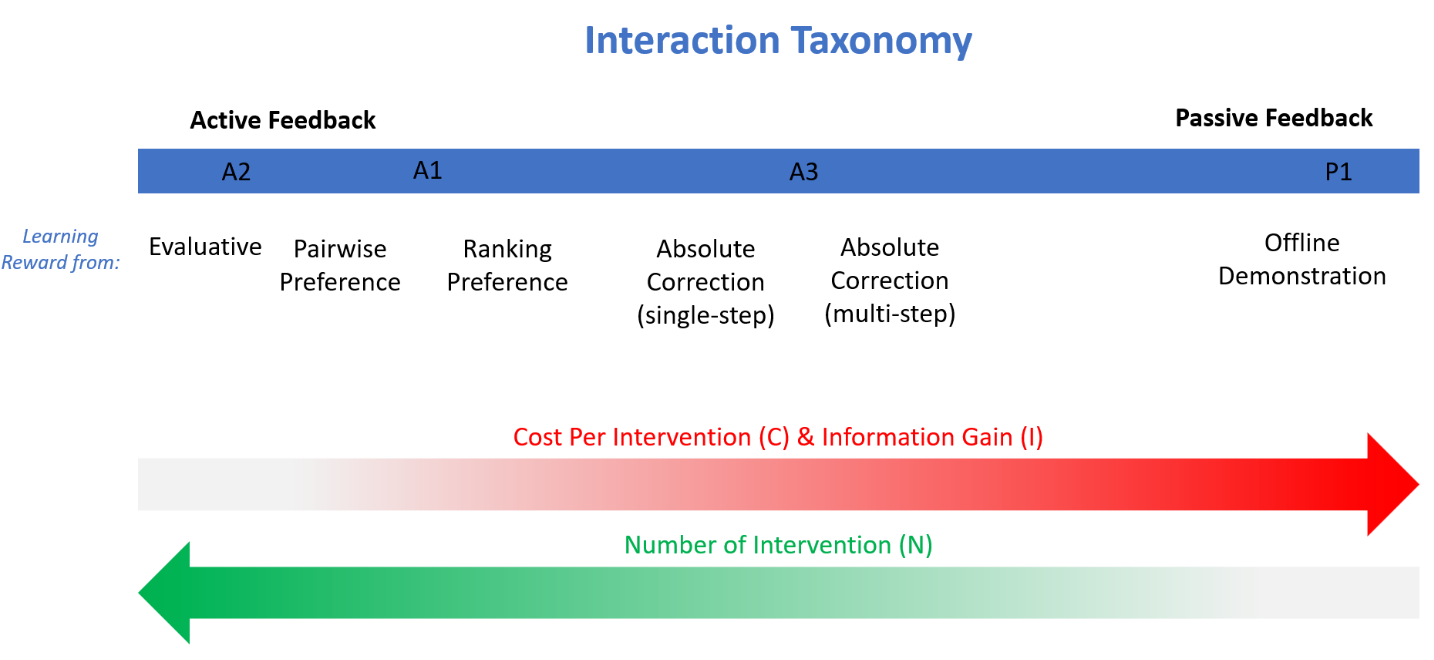
Human-in-the-Loop Reward Learning for Robotics: Methods, Challenges and Opportunities
Conducted a comprehensive review of human-in-the-loop reward learning for robotics, proposing a unified taxonomy of human feedback paradigms and identifying future research directions in corrective-feedback-based reward learning.
Project under the guidance of Zhaoting Li, Prof Jens Kober for Literature Research
CLIC-Chunks: Contrastive Policy Learning from Interactive Corrections with Action Chunking
This research investigated extending desired action space in CLIC framwork to desired action chunk space. Then it learns a Q-value function parametrized using Energy-Based Model to predict temporally coherent action chunks and execute in a receding horizon fashion. Evaluated across five contact-rich and multi-arm manipulation tasks, CLIC-Chunks maintained high success rates for various tasks while revealing a critical scalability limit: Langevin MCMC sampling efficacy significantly degrades when the total action chunk dimensionality exceeds 20.
Project under the guidance of Zhaoting Li, Prof Jens Kober for Research Assignment course
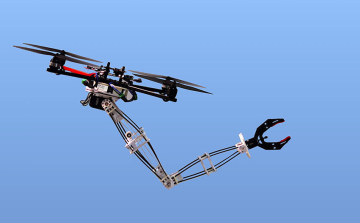
Whole body control of Aerial Manipulator
Researched on whole body control of a 2-DoF aerial manipulator using Nonlinear Model Predictive Control, integrating the system's coupled contact kinodynamics. Developed a high-fidelity full-body aware contact aerial manipulator in MuJoCo.
Project under the guidance of Dr Sihao Sun, Prof Javier Alonso-Mora for Honours Programme Master
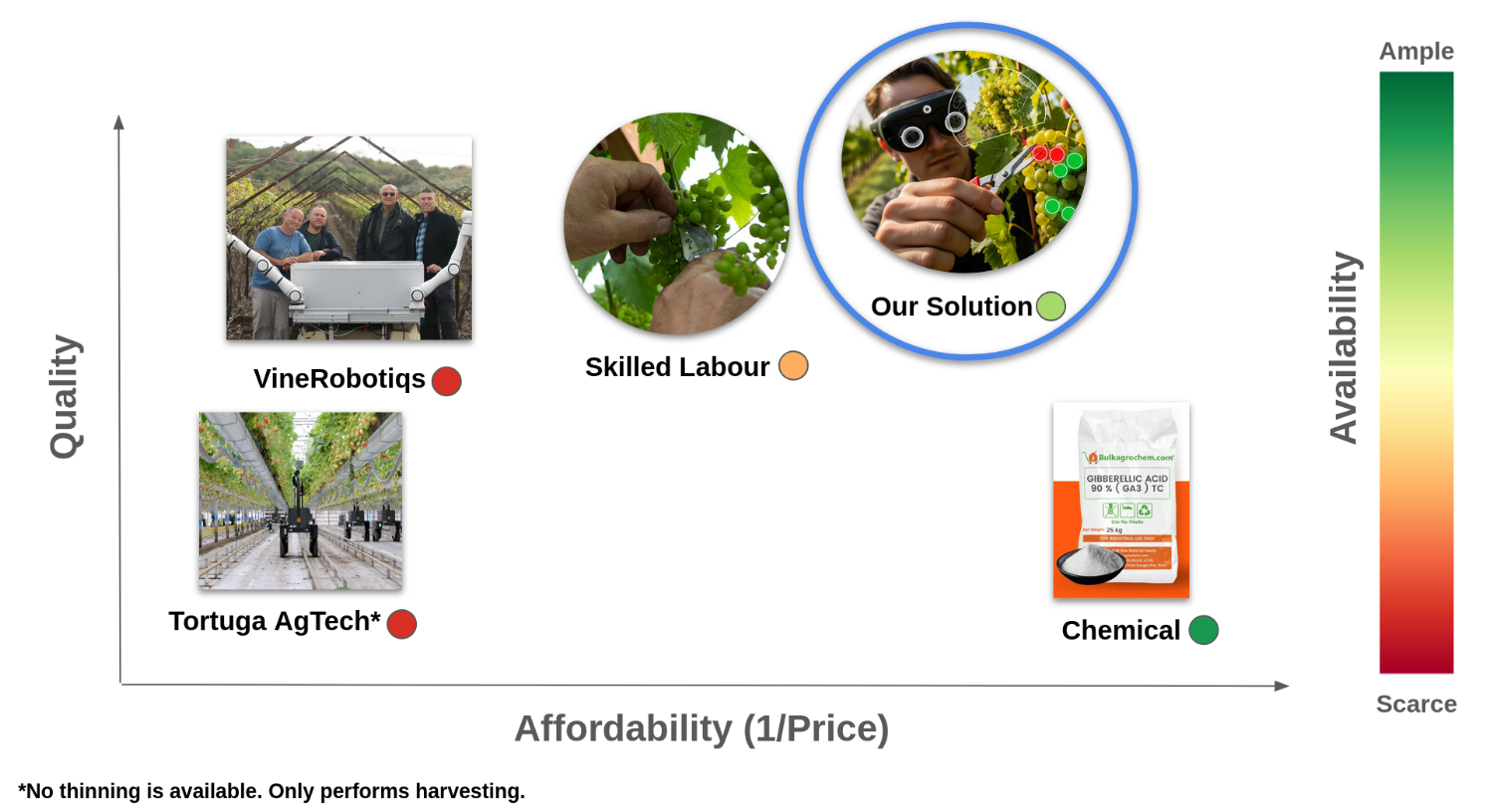
Idea to Start up
Executed a rigorous startup validation study to address skilled labor shortages in global viticulture. Utilizing Lean Startup methodology, the project validated the commercial viability of an AI-powered Augmented Reality (AR) system designed to guide unskilled workers in complex grape-thinning tasks. Through international customer discovery and competitive analysis, the study pivoted from capital-intensive robotics to a scalable AR solution. Financial modeling confirmed a projected labor cost reduction of €14,400 per hectare and a 60% reduction in disease risk, validating a Serviceable Obtainable Market (SOM) of €0.5 billion.
Project under the guidance of Prof Aleksandar Giga, Idea to Start-up – Deep Tech
Intelligent Robotic Control: Physics-Informed Learning, Iterative Learning Control, and Gaussian Processes
Implemented data-driven control strategies by uses physics-informed modeling, and probabilistic methods to control robotic manipulators
Deep Learning Architecture: Developed a Convolutional Neural Network (CNN) in PyTorch to regress robot joint angles directly from raw pixel observations.
Physics-Aware Formulation: Engineered an indirect regression strategy targeting continuous trigonometric components (sinθ, cosθ) to resolve the discontinuity issues inherent in raw angle prediction.
Performance Optimization: Significantly improved state estimation accuracy by recovering joint configurations via arctan2, validating the superiority of continuous representations over direct angle regression.
Project under Prof Cosimo Della Santina, Intelligent Control Systems course
Autonomous Apple Harvesting Robot: SLAM, Mobile Manipulation & Human-Robot Interaction
Designed and validated a cost-effective autonomous harvesting solution using the MIRTE Master platform to operate in unstructured agricultural environments. The system utilizes ROS 2 for modular control, integrating SLAM Toolbox and MPPI for robust navigation and dynamic obstacle avoidance. Perception relies on a fine-tuned YOLOv8n model that achieved 0.99 mAP@50 for differentiating ripe/unripe apples, enabling precise end-effector targeting. To ensure safety, a visual gesture recognition pipeline was implemented to interpret human commands in real-time. Despite hardware constraints, a compliant friction-based grasping strategy was engineered to successfully harvest and deposit apples into a custom-designed storage unit
Project under Multidisciplinary Project course

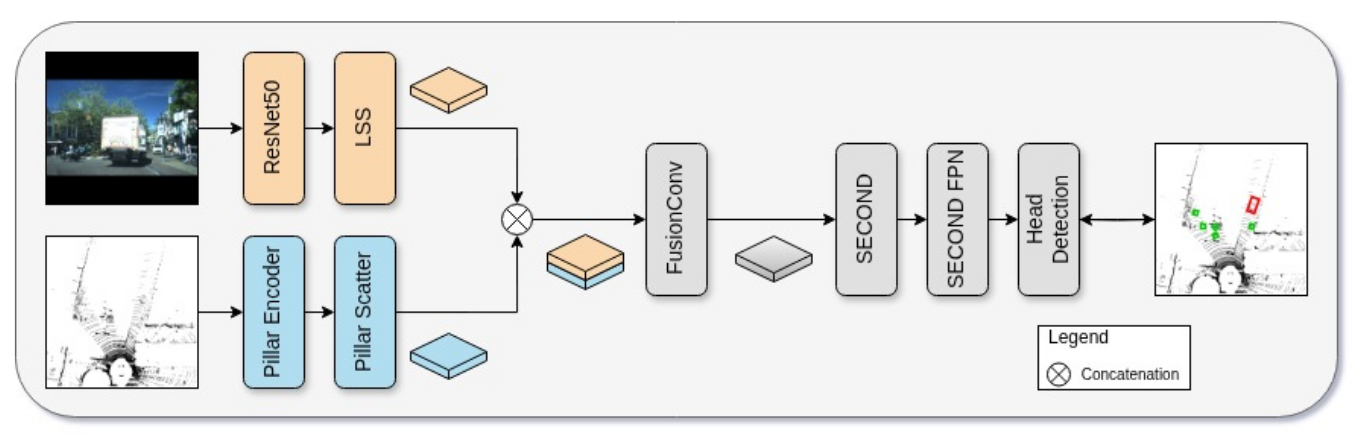
Enhancing 3D Object Detection: A Multi-Modal BEV Fusion and Affine Augmentation Framework
Developed BEVFusion-L, a robust late-fusion architecture that integrates ResNet-extracted RGB semantics with voxel-based LiDAR features to address sensor sparsity in autonomous driving. To mitigate overfitting and class imbalance on the View of Delft (VoD) dataset, an instance-level augmentation pipeline was engineered using random affine transformations. This approach achieved 77.74% mAP on the test set, delivering a +10.96% improvement over the state-of-the-art CenterPoint baseline. The model validated superior robustness for small and occluded objects, significantly enhancing detection accuracy for pedestrians and cyclists in complex urban environments.
Project under Prof Holger Caesar, Advanced Machine Perception course
Living Well with Robots: A Socio-Cognitive Approach to Responsible Robot Integration
This project investigates the psychological and societal implications of integrating embodied Artificial Intelligence into domestic environments. The research critically evaluates the phenomenon of cognitive offloading, analyzing how excessive reliance on external automation can lead to reduced critical thinking and memory retention. Furthermore, the study addresses the ethical tensions surrounding privacy and surveillance within personal spaces. The work culminates in a framework for responsible engineering to ensure robotic systems preserve human agency, cognitive autonomy, and accountability rather than inducing obsolescence.
Project under Prof Madelaine Ley, Robot and Society course
Vision Based Navigation on Resource Constrainted Micro Aerial Vehicle (MAV)
Developed a resource-efficient autonomous navigation framework for a Parrot Bebop 2 MAV using a Convolution Neural Network. Utilizing Knowledge Distillation and self-supervised labeling using Monocular depth information, the architecture achieved a 96% parameter reduction (1.5M to 48.8K) and a 1.4 MB memory footprint, compared to the teacher network. The system integrates safety constraints, delivering real-time onboard inference at 11 FPS with 90ms latency. Validated through physical deployment, the model demonstrated 86.63% classification accuracy and an F1-score of 0.9033 in dynamic obstacle avoidance tasks.
Project under Prof Guido de Croon , Autonomous Flight of Micro Air Vehicles course

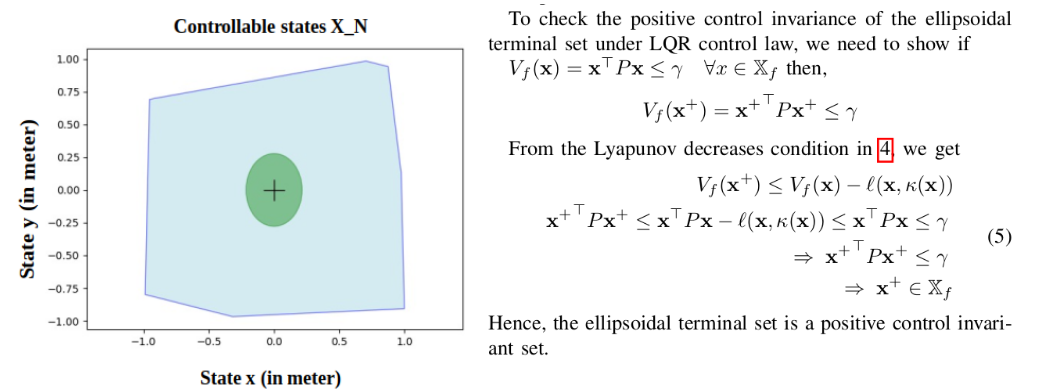
Disturbance-Robust MPC for Output Tracking of Underactuated Systems with Ellipsoidal Terminal Set
This project investigates a Model Predictive Control (MPC) framework for planar drones transporting tethered payloads. The proposed output-based MPC scheme incorporates disturbance rejection and enforces linear state and output constraints, while an ellipsoidal terminal invariant set ensures recursive feasibility and asymptotic stability. The controller’s stability is rigourously proved analytically and empirically evaluated against an LQR baseline and other metrics
Project under Prof Sergio Grammatico, Model Predictive Control course
Waypoint tracking controller of quadrotor
Developed and evaluated waypoint tracking controller for quadrotor using potential field constraints in Model Predictive Control (MPC), as a part of a Planning & Decision-Making course project.
Project under Prof Javier Alonso-Mora, Planning & Decision-Making course
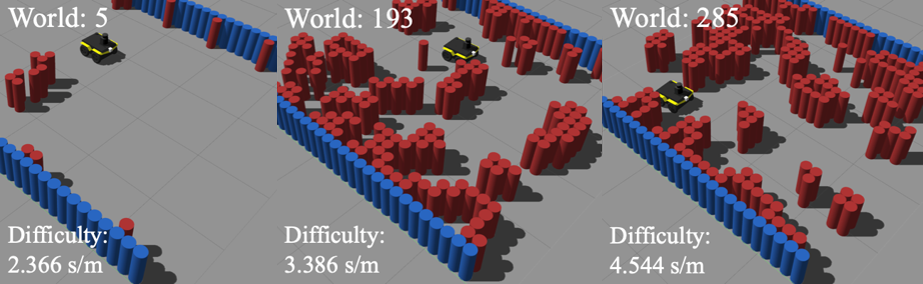
Benchmark Autonomous Robot Navigation (BARN) Challenge
The objective is to develope a navigation algorithm to manoeuvre a non-holonomic mobile robot in 300 increasing levels of highly cluttered obstacle configurations.
Strawberry Stacker
The objective is to build a multi-drone system for picking strawberry boxes from a field and stacking them onto a transport trailer. A total of 6 incremental tasks starting from the installation to the final solution to the problem are detailed here.
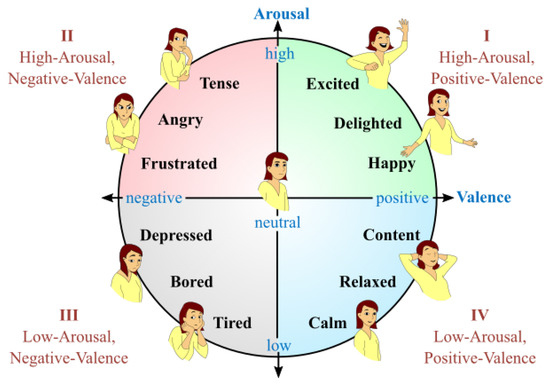
Feature Extraction of ECG Signal for Emotion Detection
The objective is to extract features in temporal, spectral and non-linear domain of ECG signals for unimodal emotion detection.
Indoor Obstacles Dection in Horizon POV
The objective is to build a deep learning based object detection model for detecting indoor obstacles in cleaning robot's point of view.

Industrial Mobile Manipulation Challenge
The objective is to perform a pick and place operation of a wheeled mobile robot in an industrial setup.

Automatic UV-C Sanitizer for Grab Handles
The objective is to build a model to prevent the spread of infection via the commonly touched surface by automating the sanitization process using Far UV-C radiation.
Smart Switch: IoT- based home automation
The objective is to developed a solution to automate household switches using a timer-based socket breaking system.

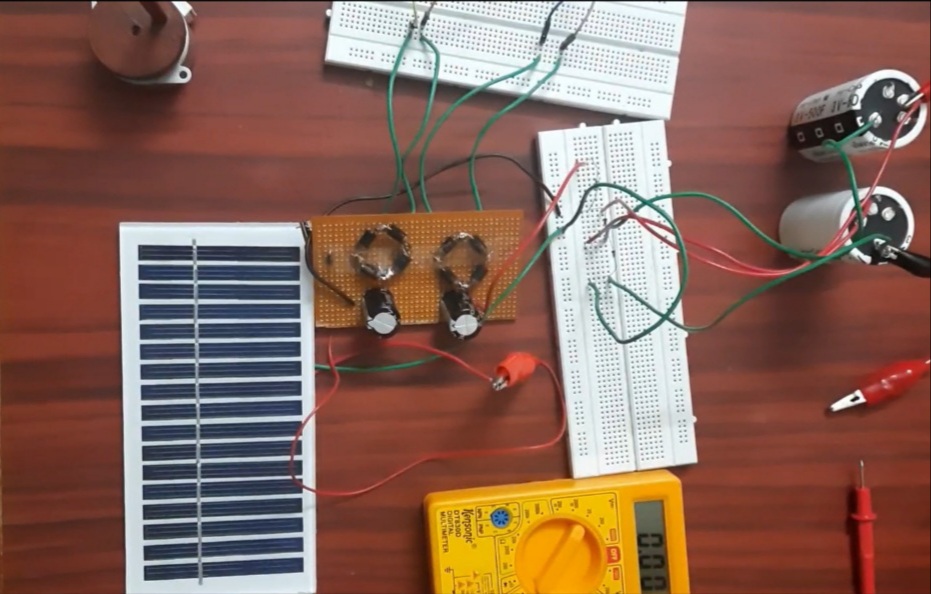
Dual Powered Multi-purpose Emergency Kit with HAM Radio Receiver
The objective is to develope a solar and hand-crank powered multiplexer-based 144 MHz HAM radio receiver.
Piezo Electric Shoe
The work aims to demonstrate a Proof of Concept (PoC) of using piezo electric sensor to cultivate electrical energy from footsteps.

DEMONSTRATIONS
Dobot Magician Experiments
Demonstration on fundamental experiments and documentation of Dobot Magician.
Turtlebot2 Experiments
Demonstration on fundamental experiments and documentation of Turtlebot2.

OPEN-SOURCE TOOLS
Art Image Distortion Dataset
Created a dataset encompassing a total of 85,1000 RGB images with 17,020 clear images and 50 distorted versions for each of these clear images
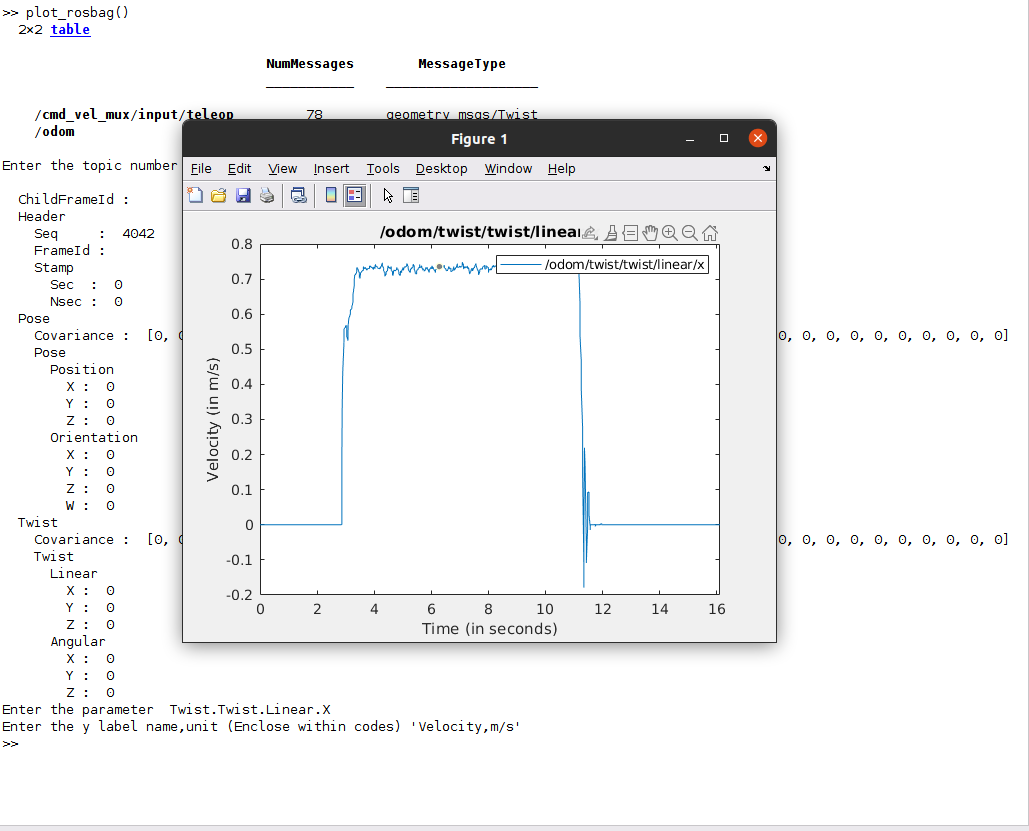
ROS bag plotter MATLAB
A tool to visualize ROS bag signals in MATLAB.
Arduino library for Ultrasonic Sensor (HC-SR04)
An Arduino library to compute proximity information for HC-SR04.
.png)
CR2-Deleter
Manually selecting and moving only. CR2 images (Canon's RAW images) to another folder can be tedious. This code provides a simple window to move and delete the RAW images within few clicks.